我们最近在《科学机器人》杂志上发表的工作描述了一种新型计算机,非常适合控制软机器人。我们的软物质计算机(SMC)受到信息在血管系统中编码和传输方式的启发。
在过去的十年中,软机器人技术迅速普及。在某种程度上,这是因为用软材料制成的机器人可以轻松适应并适应其环境。这使得软机器人特别适合需要微妙触感的任务,例如处理易碎材料或靠近(人体)的操作。
但是,到目前为止,大多数软机器人系统都由常规的电子设备控制,这些电子设备由诸如硅的硬质材料制成。这意味着将坚硬的组件放到原本柔软的系统中,从而限制了其整体灵活性。相反,我们的SMC仅使用柔性材料,从而使软机器人保留了许多柔软性。运作方式如下。
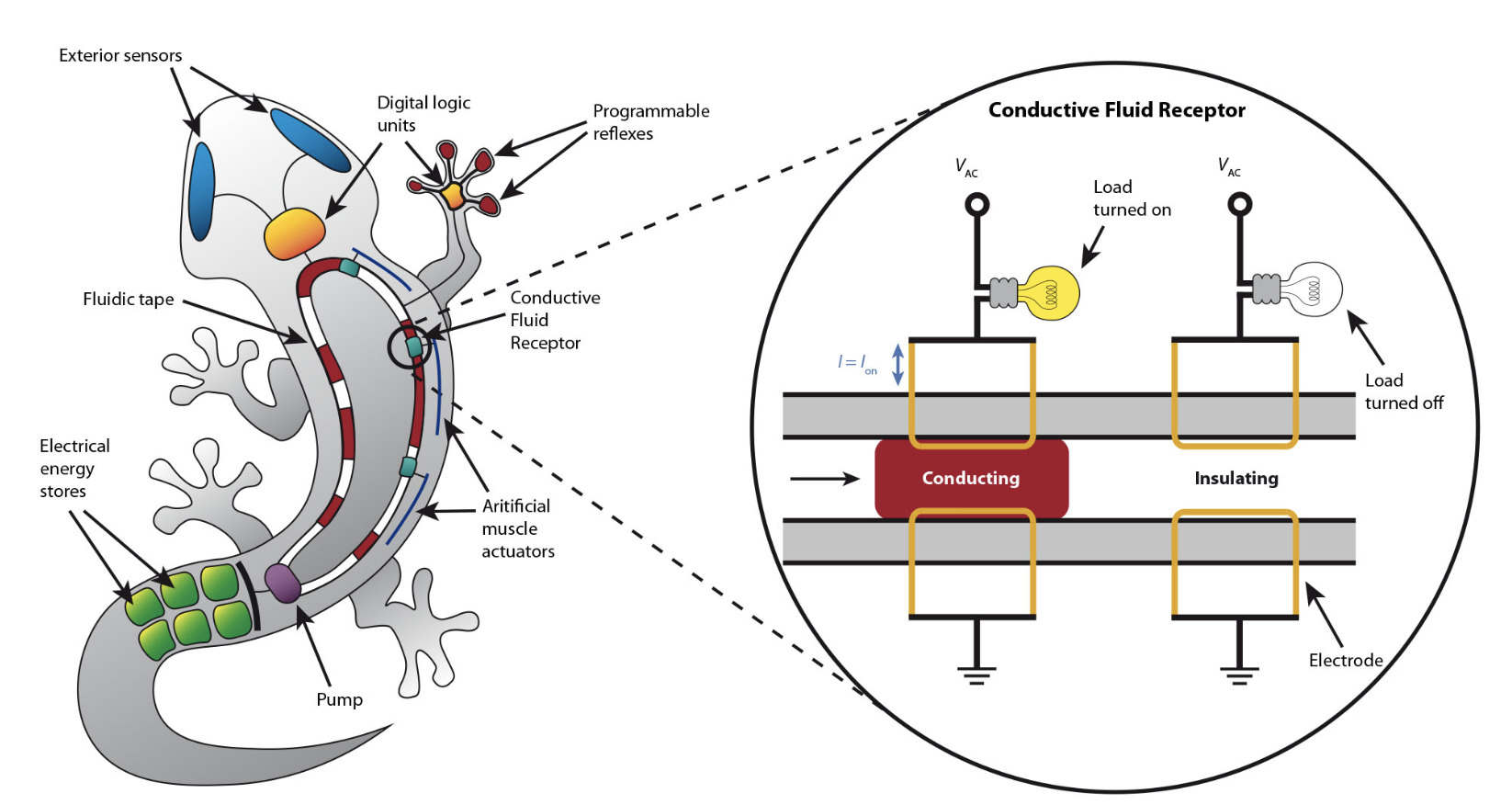
我们的软物质计算机的组成部分是导电流体接收器(CFR)。CFR由两个电极组成,两个电极平行于流体流动方向放置在软管的相对两侧。我们将绝缘(空气,透明)和传导(盐水,红色)流体注入CFR。当盐水连接两个电极时,CFR打开。通过将软执行器连接到CFR,我们可以获得简单的控制系统。
通过将多个CFR连接在一起,我们可以创建执行更复杂计算的SMC。在我们的论文中,我们展示了用于执行模拟和数字计算的SMC体系结构。这意味着从理论上讲,SMC可用于实现电子计算机上使用的任何算法。
SMC可以轻松集成到软机器人的主体中。例如,蠕虫[1]由两个形状记忆合金(SMA)致动器提供动力。这些执行器在电流流过时会收缩。通过控制两个执行器的激活模式,可以产生三个不同的步态。我们证明了我们可以将SMC集成到蠕虫的体内,并通过改变SMC的编程来产生这三种步态。下面的视频显示了SMC-Softworm,盐水被染成红色。
SMC并不是第一个为软机器人设计的软物质控制系统。其他研究小组已经开发了流体[2]和微流体[3,4]控制系统。但是,这些方法仅限于控制流体致动器。SMC输出电流,这意味着它可以与大多数软执行器连接。
软机器人的一个巨大挑战是开发完全由软材料制成的自主和智能机器人系统。我们认为,SMC是迈向该系统的重要一步,同时也为环境监测,智能修复设备,可穿戴生物传感和自愈复合材料提供了新的可能性。
M. Garrad,G。Soter,AT Conn,H。Hauser和J. Rossiter合着的《科学机器人》论文“用于软机器人的软物质计算机”中,您可以了解更多有关此工作的信息。